

In this first blog post, we’ll discuss the basic principles of DC motor operation. We will also discuss the DC motor’s construction.
DC Motor: What Is It?
A DC motor is a motor that converts direct current into mechanical work. The Lorentz Law, which states that “the current carrying conductor placed in a magnetic and electric field experience a force,” is the foundation upon which it operates. The Lorentz force is that force.
DC Motor Varieties
There are four main categories of DC motors:
Permanent Magnet
DC Motor Series
DC Motor Parallel/Shunt
Composite DC Motors
ESSENTIAL READER ON DC MOTORS:
Different Types of DC Motors
AC vs. DC Motor Differences
DC Motor Speed Control
DC Motor Applications
Ultrahealthly | vitaglobally | healguidance | defendinsurer | officinastudio | medictracknet | nurturemedhub | nurseangelhub | carevitalweb | sanitizehealth
Building a DC Motor
We must first grasp the structure of DC motors in order to comprehend how they operate. The DC motor is composed of two major components.
Armature
Stator
The armature is the revolving component, and the stator is the stationary component. The DC supply is linked to the armature coil.
The brushes and commutators make up the armature coil. Brushes transport the current from the rotating portion of the motor to the stationary external load, while the commutator transforms the AC induced in the armature into DC. The permanent or electromagnet’s armature is positioned between its north and south poles.
DC Motor Operating Principle
An electrical device that transforms electrical energy into mechanical energy is a DC motor. A current-carrying conductor receives mechanical force whenever it is placed in a magnetic field. This is the fundamental principle underlying the operation of a DC motor.
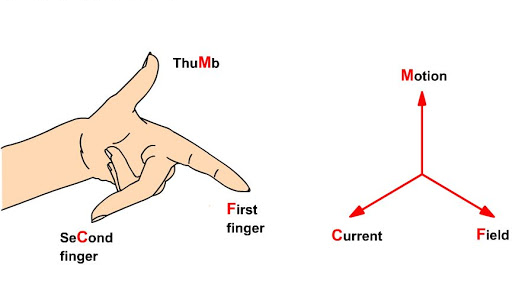
The Left-Hand Rule of Fleming
Should we extend our left hand’s first, second, and thumb to be perpendicular to one another, the first finger would signify the direction of the magnetic field, the second, the direction of the current, and the thumb, the direction of the force applied to the current-carrying conductor.
F is equal to BIL Newtons.
Where L is the conductor’s length inside the magnetic field, I is the current, and B is the magnetic flux density.
A current builds up in the armature winding when it is linked to a DC supply. The magnetic field is produced by field winding (electromagnetism) or permanent magnets. In this instance, the magnetic field exerts a force on current-carrying armature conductors in accordance with the previously mentioned principle.
To produce torque in a single direction, the commutator is divided into segments. If not, each time the conductor’s direction of movement in the magnetic field was reversed, the direction of force would have changed accordingly. This is how a DC motor works!
Back: DC motor’s EMF
The fundamental law of nature states that energy conversion cannot occur unless there is an opposing force. This resistance is provided by magnetic drag in the case of generators, but back emf exists in the case of DC motors. When a DC motor has a back emf, it becomes “self-regulating.”
According to Faraday’s law of electromagnetic induction, an electromagnetic field (EMF) induces in the armature conductors of a motor. At the same time, it rotates since the conductors of the motor are also cutting the magnetic flux lines.
This induced emf is oriented in a way that opposes the armature current (Ia). The armature current and back emf are shown in the circuit diagram below.
The back emf’s magnitude and motor speed are directly correlated. Imagine that a DC motor’s load is abruptly lowered. In this instance, the needed torque will be less than the available torque. The additional torque will cause the motor’s speed to increase. As a result, the size of the back emf will rise in proportion to the speed. Armature current will start to decrease as back emf rises. Since torque is inversely correlated with armature current, it will likewise diminish until it is adequate to support the load. The motor’s speed will, therefore, be regulated.
However, if a DC motor is rapidly loaded, the load will result in a speed reduction. More armature current is possible because of the back emf’s decrease in response to the speed drop. In order to meet the load requirement, the torque will increase due to an increase in armature current.
Know more visit: https://robu.in/